|
| >
Ravi Prakash
Email:ravipr[at]iisc[dot]ac[dot]in
Hello there!,
I am an Assistant Professor at the Robert Bosch Centre for Cyber- Physical Systems in the Indian Institute of Science Bengaluru.
Before this, I was a Postdoctoral Researcher in the Learning and Autonomous Control group at the department of Cognitive Robotics, TU Delft. I earned my Ph.D. in Control & Automation , from the Indian Institute of Technology Kanpur.
My research has contributed towards skill learning and optimal control for intelligent robots. I am a recipient of the DAAD Postdoc networking fellowship for AI and Robotics, with funded research visits to the German Aerospace Center (DLR), Munich.
My current research interests include learning complex manipulation policies from human demonstration/corrections, bimanual robot manipulation, task generalization in a novel environment, and human-friendly safe compliant control.
I have founded and direct the Human-interactive Robotics Lab at the Indian Institute of Science. Details about my research group can be found there.
 | |
 | |
 | |
 | |
 | |

|
|
News
| [Aug 2024] |
Co-Intructor in "AE 372 : Optimal Control and State Estimation" Course |
| [June 2024] |
Gave a talk on "Interactive Skill Learning and Generalization to Novel Situation" at Department of Computer Science and Engineering, IIT Kharagpur. |
| [May 2024] |
Co-Instructor in "E1 316o : Deep Learning for Robotics" Summer Course |
| [Mar 2024] |
Co-organized the 3rd Workshop on Human-Interactive Robot Learning (HIRL) at HRI 2024. |
| [Mar 2024] |
I am serving as an Associate Editor for IEEE/RSJ IROS 2024. |
| [Feb 2024] |
My Master's student, Amin, at TU Delft graduated with a Cum-Laude-Distinction |
| [Jan 2024] |
I am supervising 4 Master's students (Vishnu, Sahil, Farhad and Saumya). |
| [Jan 2024] |
I have been awarded the IISc Starting Grant for my research activities. |
| [Dec 2023] |
I have joined IISc as an Assistant Professor and I lead the Human-interactive Robotics Lab . |
| [Nov 2023] |
Bid farewell to TU Delft |
| [Sep 2023] |
Gave a talk on "Robot Learning from Non-expert Humans" at SysCon, IIT Bombay. |
| [Aug 2023] |
Participated in the International Workshop of Intelligent Autonomous Learning Systems 2023 at Kleinwalsertal, Austria. Delivered a talk on "Interactive Learning and Generalization of Dynamical Motor Primitives". |
| [Jun 2023] |
Gave a talk on "Robot Learning from Non-expert Humans" at RBCCPS, IISc Bengaluru. |
| [Mar 2023] |
I am serving as an Associate Editor for IEEE/RSJ IROS 2023. |
| [Feb 2023] |
I am assisting in Teaching for RO47013 - Control in Human-Robot Interaction at TU Delft. |
| [Nov 2022] |
Co-authored a book on "Interactive Imitation Learning in Robotics - A Survey", published by NOW Publishers. |
| [Oct 2022] |
I am supervising my second Masters' student, Amin, at TU Delft. |
| [Sep 2022] |
I am assisting in Teaching for RO47002 - Machine Learning for Robotics at TU Delft. |
| [Sep 2022] |
I am visiting German Aerospace Center (DLR), Munich under DAAD Postdoc Fellowship. |
| [Sep 2022] |
My Masters' student, Besim, at TU Delft graduated. |
| [Aug 2022] |
I am serving as Session Chair in IEEE CASE 2022, Mexico City, Mexico. |
| [May 2022] |
Our paper on Closed Form HJB Solution for Path Planning of a Robot Manipulator with Warehousing Applications was accepted at IEEE CASE 2022. |
|

|
Interactive Imitation Learning in Robotics: A Survey
Carlos Celemin,
Rodrigo Pérez-Dattari,
Eugenio Chisari,
Giovanni Franzese,
Leandro de Souza Rosa,
Ravi Prakash,
Zlatan Ajanović,
Marta Ferraz,
Abhinav Valada, and
Jens Kober
Foundations and Trends® in Robotics: Vol. 10: No. 1-2, pp 1-197.
[NOW Publishers] [IEEE Xplore]
[arxiv]
|

|
European Research Council (ERC) Project: TERI
Project Title: Teaching Robots Interactively (TERI). PI: Jens Kober, TU Delft.
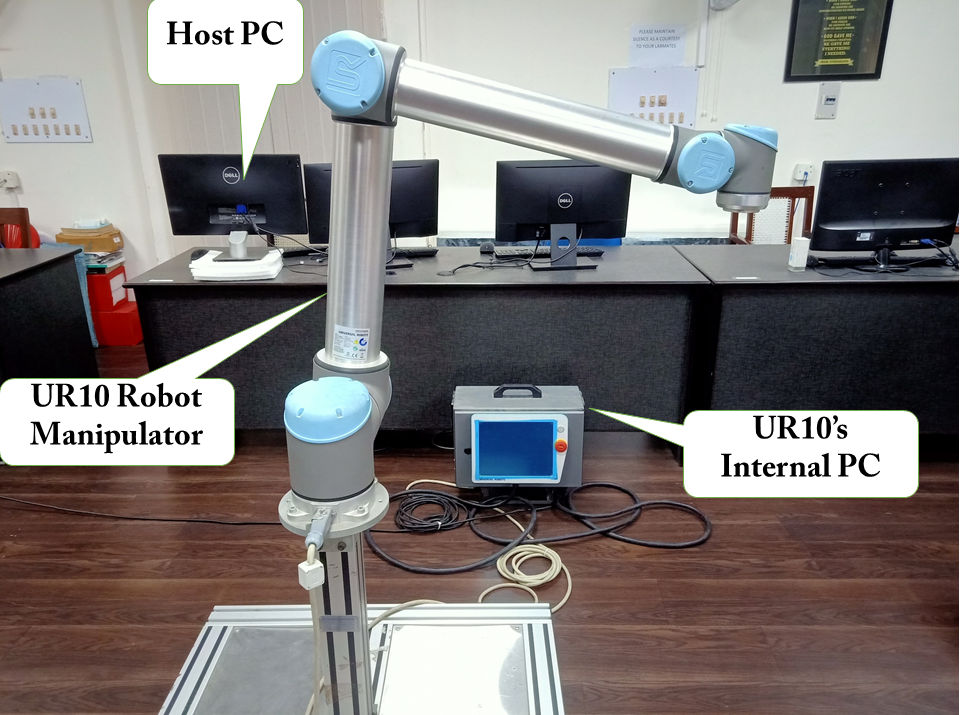
Working as a Scientific Researcher in this project during my Postdoc at TU Delft. My goal is to realize a scientific contribution in enabling robots to learn and generalize how to perform manipulation tasks from few human demonstrations, based on novel interactive machine learning techniques. Developed interactive imitation learning method to generalise the robot demonstrations in
novel situations using vector field transformation. Applications : Cleaning novel surfaces,
Dressing clothes, Pick and Place.
|

|
Indo German Science and Technology Centre (IGSTC) Project: TransLearn
Project Title: Robot Skill transfer for Real World Deployment in Manufacturing Industries and Warehouses.
Joint Collaboration between Karlsruhe Institute of Technology (PI: Torsten Kroger), KUKA Deutschland GmbH (PI: Rainer Bischoff), TATA Consultancy Services
(PI: Swagat Kumar) and Indian Institute of Technology Kanpur (PI: Laxmidhar Behera). Worked as a Scientific Researcher in this project towards the partial
fulfilment of my Ph.D. degree. Developed of a imitation learning framework to transfer human skills to a robot in real world. Integrated a intelligent
optimal adaptive control to account for uncertainities in the robot model. Practical Demonstrations on household chores like organizing a dining table
and serving drinks. Representative Publication under review in IEEE T-CST.
|

|
DST UK-India Education and Research Initiative (DST-UKIERI) Project
Project Title: Learning Robotic Motor Skills, Visual Control and Perception for Warehouse Automation. Joint Collaboration between University of Edinburgh
(PI: Sethu Vijayakumar) and IIT Kanpur (PI: Laxmidhar Behera).
Worked as a Scientific Researcher in this project towards the partial fulfilment of my Ph.D. degree. Visited School of Informatics, University of Edinburgh
to work on this collaboration with exchange of ideas and dissemination of results. Designed a skill learning framework from human demonstrations with coordinated
optimal planning and control schemes for real-world robotic applications in dynamic environments. Applications shown in Warehouse Automation with Item Sorting
on a moving conveyor belt. Representative Publications in CASE 2022, IEEE T-ASE.
|

|
TATA Consultancy Services (TCS) Project: TSaL
Project Title: Teaching Skills to a Robot. PI: Laxmidhar Behera, IIT Kanpur.
Worked as a Scientific Researcher in this project. Designed a skill learning framework from constrained optimal visual servo control via learning from
demonstration. Applications shown in retail environment for robotic order picking. Representative Publication in IEEE T-ASE.
|

|
Department of Science and Technology (DST) FIST Project
Project Title: Tennis Playing Robot. PI: Laxmidhar Behera, IIT Kanpur.
Formulated a Markov Decision Process model of Table tennis. Proposed a Pavlovian learning model for representingand inferring low-dimensional
strategic state features from high dimensional sensory observations at the top level. Dynamic Motor Primitives was used to model hitting motions
demonstrated by the expert. Proposed a piecewise-linear canonical system with lyapunov based adaptive gradient descent to learn the shape parameters.
Robust controller for mitigating environmental uncertainities. Finally, we have developed a complete system (including a vision system
for tracking the ball) using a real 4 degree-of-freedom (DOF) Barrett WAM robotic arm and show that the proposed overall framework is able to respond
to an incoming ball with high accuracy.
Representative Publication in Ro-Man 2019, SSCI 2020 and IEEE T-CST
|
|
International Robotics Challenge
|

|
IROS 2020: Open Cloud Robot Table Organization Challenge, Online
Team :ISCon_IITK, Lead: Laxmidhar Behera, IIT Kanpur. In this cloud based robotics competition the focus was on the task of table organization,
which is the essential capability for service robots and requires breakthrough technology to make it mature. I was responsible for motion control
of the robot.
|
|
Mohammed Bin Jayed International Robotics Challenge, Abu Dhabi
Team : IIT Kanpur, Lead: Prof. L. Behera, IIT Kanpur. The Challenge comprised of a team of UAVs and a UGV collaborating to autonomously
locate, pick, transport and assemble different types of brick shaped objects to build pre-defined structures, in an outdoor environment.
It is motivated by construction automation and autonomous robot based 3D printing of large structures. Developed Visually Guided UGV and AUV
for Autonomous Mobile Manipulation in Dynamic and Unstructured GPS Denied Environments for Challenge 2. Specifically, Designed the motion
planning and control of the robots along with ROS integration of the overall system.
|

|
Amazon Robotics Challenge 2017, Nagoya, Japan
Team : IITK-TCS, Lead: Laxmidhar Behera, IIT Kanpur. The Challenge comprised of designing and developing a fully
autonomous system which can attempt simplified versions of the general task of object manipulation stowing picking
in the warehouses. Each task in the challenge was comprised of known and novel items (provided 45 minutes prior to the challenge)
distributed equally. In this competition, I worked as a team member responsible for robot motion control. We defined a
cartesian approach based on the MoveIt! pick and place pipeline that took the
target grasp candidate and computed a combination of linear segments to app-
roach, contact grasp the target object, lift it after grasping and retreating with
it. The TRAC-IK library is used for inverse kinematics, configured to enforce
minimal configuration changes, and then collision checking is done with MoveIt!
using the PointCloud information from the camera. We won 3rd Prize in Picking and 5th Prize in Combined Finals among a total of 40 International Teams
|
|
Amazon Picking Challenge 2016, Leipzig, Germany
Team : IITK-TCS, Lead: Laxmidhar Behera, IIT Kanpur.
Theme of challenge remains same as of Amazon robotics challenge, 2017 with all items known a priory and no clutter.
As a team member, I was responsible for motion control of mobile manipulator.
We won 5th Prize in Stowing among a total of 40 International Teams.
|
|